简解要介绍mx27中强大的视频处理功能
Freescale公司出品的mx27芯片,秉承了欧美系芯片产商内部资源丰富,性能稳定可靠的设计原则。其中最为耀眼的功能就是其使用简单却又功能强大的视频处理单元。其内部的视频处理部分共有3个模块,分别
1.CMOS Sensor Interface 可以直接接传统的CMOS摄像头接口,也可以接CCIR视频接口,这是负责视频的采集接口部分
2.内部集成了增强型低功耗的多媒体加速器eMMA,可以进行视频的前预处理和后处理以及类似去环块(dering),色彩空间转换,放大和图像的平滑缩放等,这是视频的前后期处理部分.
3.内置硬件编解码模块,支持H.264/MPEG4硬件编解码,全双工不占用CPU资源。
我们先来介绍视频的采集和预处理部分。
视频采集芯片我们采用的是可以支持4路视频输入的TW2835。可以达到D1的视频效果,完全满足基本的视频监控需求
Techwell公司推出了 TW2835 四信道视频和音频控制器。建立在 TW2834 的成功基础之上,TW2835 将6个主要程序整合进一个芯片中,其中包括:4个高质量的 NTSC/PAL 视频解码器、4个音频模拟数字转换器、一个音频复用器,双色显示控制器,双视频译码器以及一个先进的 OSD(屏幕菜单式调节方式)。此外,TW2835 每个芯片还使用了一个单一的同步动态存储器 (SDRAM),可用于可选的 BGA 包中,还拥有一个被称为 TW2836 的 pin-to-pin(管脚到管脚)姊妹芯片。TW2836 除了不包含音频之外,与 TW2835 具有同样的功能。TW2835 利用了 Techwell 安全监控集成电路产品解决方案的广泛组合,是帮助 DVR(数码视频录像机)生产商提高质量与功能、加快上市时间以及减少成本的重要一步。在其众多功能中,TW2835 支持详尽的实时 D1 录制、在重放过程中将信道 ID 信息添加到视频流媒体中,用于自动解码与显示,同时还包含一个5层的图形覆盖功能,为 OSD、单盒、2D 阵列箱以及鼠标指示器显示特征/位图。TW2835 还包含一个简单的界面,使用多段连接支持多达16个信道系统。此外,TW2835 还嵌入了几种特别的监视功能,其中包括:运动监测、放大以及水平与垂直缩放控制。凭借置入旨在减少交叉噪音的反锯齿过滤器和高质量的梳状过滤器,TW2835 已经成为一种针对 DVR 与 Quad/Multiplexers 的高性能、具有成本效益的解决方案。
tw2835比较灵活,既可以单路切换采集4路D1视频,也可以将4路视频集成到1路D1视频输出,可以根据你的需求在应用程序上控制。成都莱得科技(www.nidetech.com)提供的驱动程序给应用程序提供了控制接口。并且提供完整的驱动程序源代码,该方案和代码在客户的实际产品中获得了成功的验证。现在我们简要的介绍一下tw2835在mx27开发板中的驱动编写和遇到的一些问题。
一、驱动的架构和实现
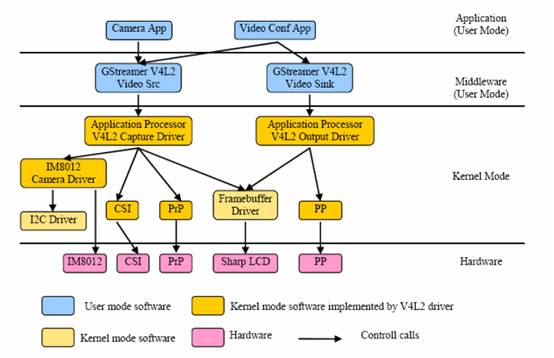
tw2835和mx27的视频流传输是通过mx27的CSI接口,命令控制接口采用I2C
也就是是说驱动分为两个部分
1、 i2c驱动:
负责初始化和配置芯片,例如设置和获取颜色,复位芯片,设置通道属性,检测芯片的存在与否,设置csi接口的时钟等
//驱动初始化
static __init int tw2835_init(void)
{
u8 err;
gpio_tw2835_active();
err = i2c_add_driver(&tw2835_i2c_driver);
return err;
}
//首先要对硬件引脚功能进行初始化,
void gpio_tw2835_active(void)
{
//设置CSI接口的引脚功能
gpio_request_mux(MX27_PIN_CSI_D0, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D1, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D2, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D3, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D4, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_MCLK, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_PIXCLK, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D5, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D6, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_D7, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_VSYNC, GPIO_MUX_PRIMARY);
gpio_request_mux(MX27_PIN_CSI_HSYNC, GPIO_MUX_PRIMARY);
/* Power down control */
mdelay(10);
gpio_request_mux(MX27_PIN_USBH1_RXDM, GPIO_MUX_GPIO);
mxc_set_gpio_direction(MX27_PIN_USBH1_RXDM, 0);
mxc_set_gpio_dataout(MX27_PIN_USBH1_RXDM, 1);
/* Reset芯片 */
mdelay(10);
gpio_request_mux(MX27_PIN_CSPI1_RDY, GPIO_MUX_GPIO);
mxc_set_gpio_direction(MX27_PIN_CSPI1_RDY, 0);
mxc_set_gpio_dataout(MX27_PIN_CSPI1_RDY, 0);
mdelay(10);
mxc_set_gpio_dataout(MX27_PIN_CSPI1_RDY, 1);
mdelay(10);
}
然后,进行调用i2c驱动接口,i2c_add_driver ,加入新的驱动。由框 |

 相关技术论文:
相关技术论文: