|
|
|
|
直角坐标机器人在食品行业的应用 |
|
|
|
在很多产品的生产过程中,应用机器人来完成一些生产工序,不仅能提高生产效率,降低成本,更能提高产品质量。例如在食品生产过程中,机器人可以完成外观检验、搬运、包装、托盘化运输、在食品行业的应用中,由于机器人自身采用了便于清洁的不锈钢材质和多重防护措施,又避免了人工参与,所以易于保证食品卫生及食品质量。由于机器人工作时具有高度重复的一致性,因此一些生产工序由机器人来完成,会使产品的重量更加精确,外观更加精美,减少浪费,降低成本。机器人可以24小时高速高效工作,可以替代多名人工,随着劳动力成本不断上升,应用高效经济的直角坐标机器人会降低生产成本。直角坐标机器人还被广泛应用在医药、化妆品、包装、仪表装配、继电器生产等众多行业。本文先概述直角坐标机器人,再主要介绍直角坐标机器人在食品行业的应用案例。
一 直角坐标机器人简介
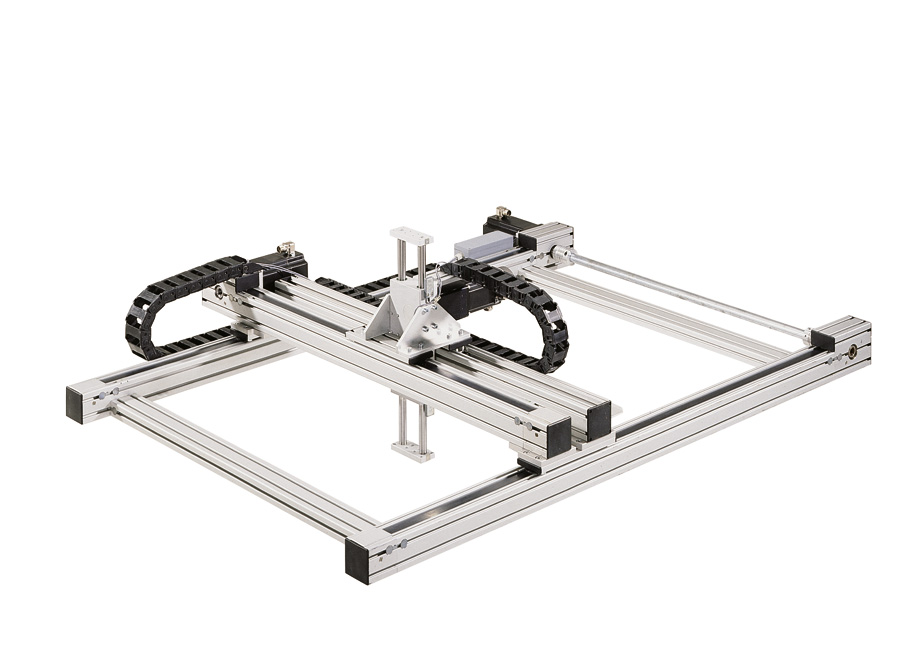
机器人按ISO 8373定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。
二 食品行业对于直角坐标机器人的要求和工作原理
1 工作要求:
1) 首先把从传送带传送过来的糕点抓住,再保证糕点间部份重叠及装入包装纸盒内。
2) 每小时处理12000个糕点,每天可工作24小时,每周可工作六天。
3) 机器人运动轴要有相应的防护措施,防止糕点屑掉到运动轴上。
4) 要能适用3种传送糕点方式,5种不同形状和体积的包装盒以及对于不同形状和体积的糕点的码放。
5) 更换不同品种糕点时机器人系统的停机时间最长不超过5分钟。
6) 装满糕点后由人工搬运走。
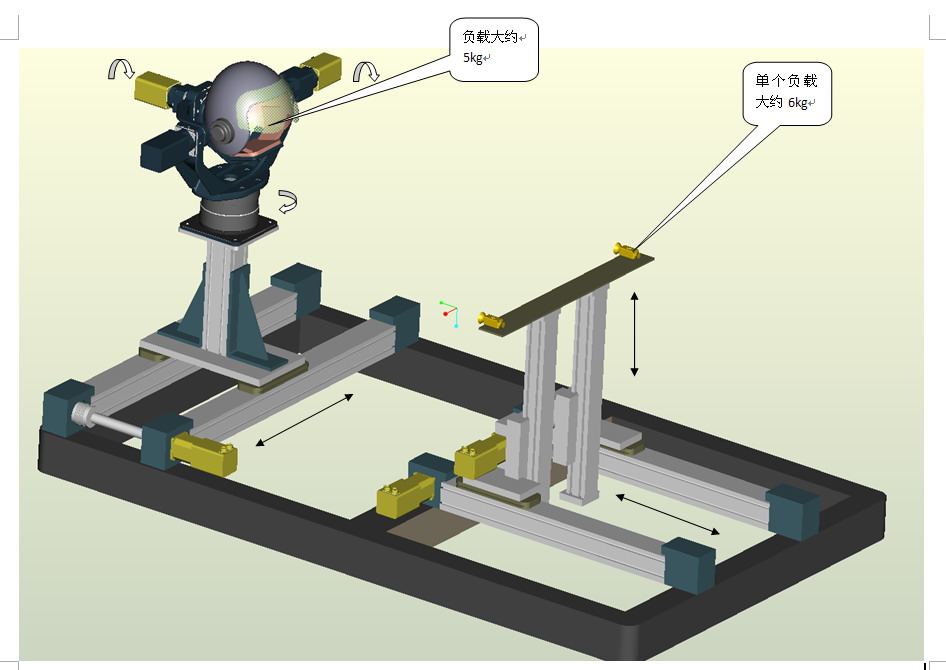
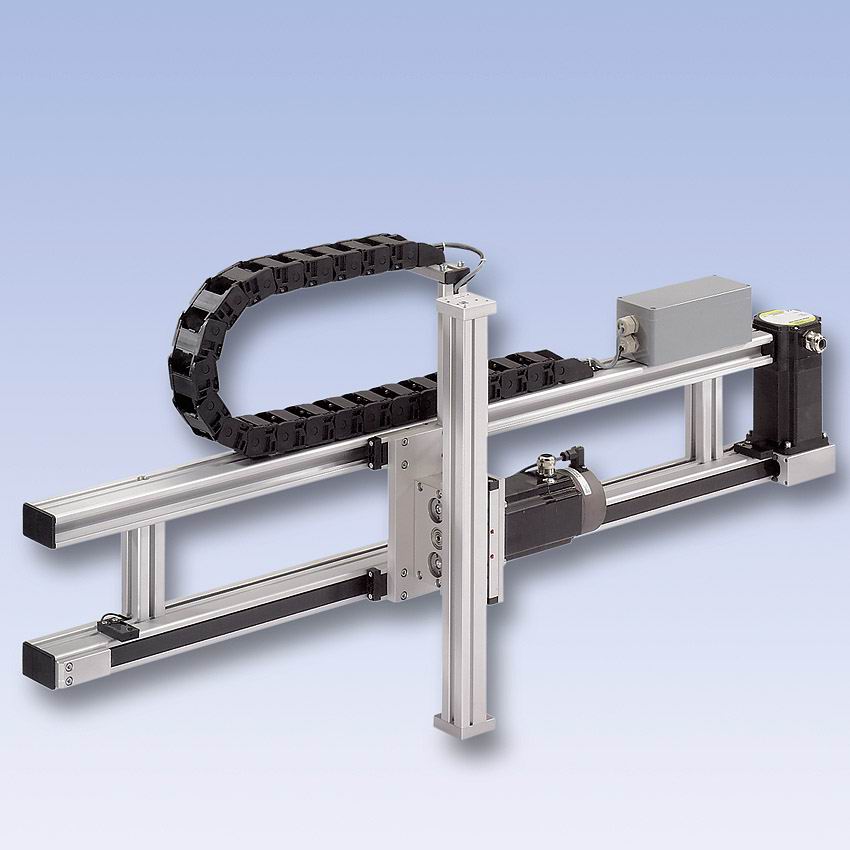
2 机器人结构
由于行程小,负载轻,运动速度高及不怕食品腐蚀,我们采用的XZ高动态结构机器人。该结构机器人自身重量轻,使其具有很好的高动态特性,可以完成快速加速或减速的运动及高速运动。在工作过程中食品一直在X轴和Z轴的下方使糕点屑不易粘到机器人上,加之机器人本体不怕食品腐蚀,自身不产生污染和粉尘。
该机器人的控制系统采用德国Berger Lahr公司的智能型伺服驱动系统TLC634。TLC6系列伺服驱动系统可任意修改运动程序。
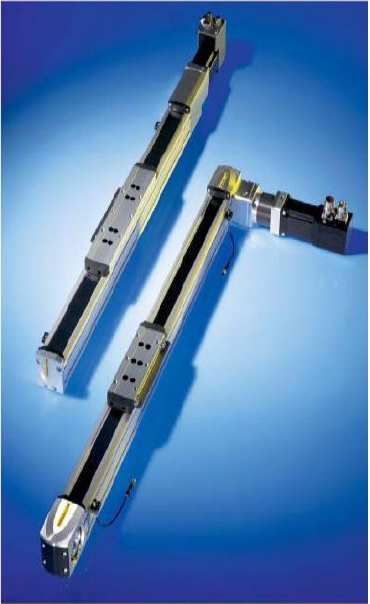
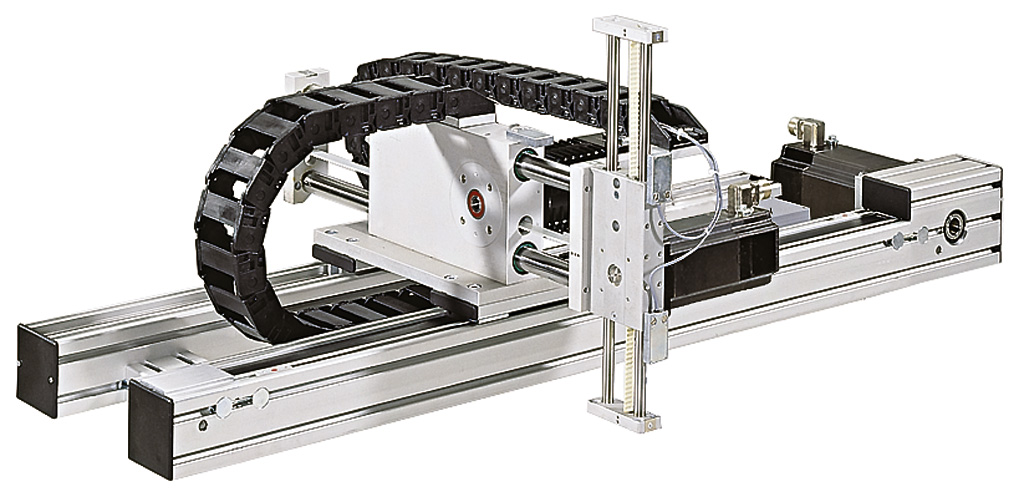
对于大负载的应用可选用带防护带的直线运动单元。齿型带已把里面的直线导轨全部盖上,在最外面又加一个防护钢带。防护钢带被直线运动单元内部的磁行材料吸在齿型带的外面,防止灰尘等接触齿型带和直线导轨。还可以采用丝杠和尺条传动方式。
3 工作过程
机器人工作时从传送带上传送来的糕点分两排并列向机器人工作地点传送。由于糕点形状的原因,当两个糕点被最终点定位板挡住后,后面的两个糕点会部分压到前面的两个糕点上。当这一传送带上有8个糕点时其对应的4个传感器就都有输出信号,机器人就可以快速运动到其上方,然后Z轴下降使其吸盘完全压到糕点上,再通过负压把糕点吸住,然后先Z轴上升400mm,X轴再运动到包装盒上方,这时Z轴下降使糕点进入包装盒内,吸盘充气释放糕点。这样就完成了一次从抓取到装入盒内的过程,再开始完成从令一传送带上的抓取搬运和装盒过程。完成一次抓取搬运和装盒过程的时间是2.1秒,有0.3秒的剩余时间。在整个运动控制过程中,要检测抓取到位信号,压力信号等。
三 注意点
1) 由于在糕点生产过程中会有油物,易使运动轴粘上糕点渣,所以机器人必须有相应的防护措施。在本项目中采取高密度双刷去糕点渣办法。
2) 另外整个机器人上裸露处及内部一些关键件全部采用无锈钢材材料使其不上锈。
3) 由于食品行业对卫生要求很高,必须确保机器人在工作中不掉润滑油,不产生任何灰尘。
四 展望
综上所述的直角坐标机器人近10年来一直高效的应用在食品行业,并获得国内外客户的好评。而在有的食品生产过程中湿度大,还有的机器人要在有类似海水或其它腐蚀性气体和液体的环境下工作,因此机器人的防水防腐性能就变得很重要。莱茵机电有限公司的技术人员与用户密切合作,成功地解决了这些难题。经过的不断完善,今天沈阳莱茵公司的直角坐标机器人已经成功的应用于很多食品生产加工行业。更多的应用及相应的详细资料请与沈阳莱茵机电有限公司联系(联系人:丛经理; 电话:13897962353; 信箱:david_0828@163.com)。
|
|
|
|
 相关博客新闻: 相关博客新闻: |
|
| 相关技术论坛: |
|
| 相关风采图片: |
|
| 相关技术论文: |
|
|